手册
Version:
2020.3
- Unity 用户手册 2020.3 (LTS)
- New in Unity 2020 LTS
- 包
- 已验证包
- 2D Animation
- 2D Pixel Perfect
- 2D PSD Importer
- 2D SpriteShape
- Adaptive Performance
- Addressables
- Advertisement
- Alembic
- Analytics Library
- Android Logcat
- Animation Rigging
- AR Foundation
- ARCore XR Plugin
- ARKit Face Tracking
- ARKit XR Plugin
- Burst
- Cinemachine
- Code Coverage
- Core RP Library
- Editor Coroutines
- FBX Exporter
- High Definition RP
- In App Purchasing
- Input System
- iOS 14 广告支持
- JetBrains Rider 编辑器
- Magic Leap XR Plugin
- ML Agents
- Mobile Notifications
- Multiplayer HLAPI
- Oculus XR Plugin
- OpenXR 插件
- Polybrush
- Post Processing
- ProBuilder
- Profile Analyzer
- Quick Search
- Recorder
- Remote Config
- Scriptable Build Pipeline
- Shader Graph
- Test Framework
- TextMeshPro
- 时间轴
- Unity Distribution Portal
- Universal RP
- 版本控制
- Visual Effect Graph
- Visual Studio Code 编辑器
- Visual Studio 编辑器
- WebGL Publisher
- Windows XR Plugin
- Xiaomi SDK
- XR Plugin Management
- 预览包
- 核心包
- 内置包
- AI
- Android JNI
- 动画
- Asset Bundle
- Audio
- 布料
- Director
- Image Conversion
- IMGUI
- JSONSerialize
- Particle System
- 物理 (Physics)
- Physics 2D
- Screen Capture
- Terrain
- Terrain Physics
- Tilemap
- UI
- UIElements
- Umbra
- Unity Analytics
- Unity Web Request
- Unity Web Request Asset Bundle
- Unity Web Request Audio
- Unity Web Request Texture
- Unity Web Request WWW
- Vehicles
- Video
- VR
- Wind
- XR
- 按关键字排列的包
- Unity 的 Package Manager
- 创建自定义包
- 已验证包
- 在 Unity 中操作
- 安装 Unity
- 升级 Unity
- Unity 的界面
- 创建游戏玩法
- 编辑器功能
- 分析
- Asset Workflow
- 输入
- 2D
- 图形
- 渲染管线
- 摄像机
- 后期处理
- 光照
- 支持的模型文件格式
- 网格
- 纹理
- 着色器
- Shaders core concepts
- 内置着色器
- 标准着色器
- 标准粒子着色器
- Autodesk Interactive 着色器
- 旧版着色器
- 内置着色器的用途和性能
- 普通着色器系列
- 透明着色器系列
- 透明镂空着色器系列
- 自发光着色器系列
- 反光着色器系列
- 反射顶点光照 (Reflective Vertex-Lit)
- 反光漫射 (Reflective Diffuse)
- 反光镜面反射 (Reflective Specular)
- 反光凹凸漫射 (Reflective Bumped Diffuse)
- 反光凹凸镜面反射 (Reflective Bumped Specular)
- 反光视差漫射 (Reflective Parallax Diffuse)
- 反光视差镜面反射 (Reflective Parallax Specular)
- 反光法线贴图无光照 (Reflective Normal Mapped Unlit)
- 反光法线贴图顶点光照 (Reflective Normal mapped Vertex-lit)
- 使用 Shader Graph
- 编写着色器
- 编写着色器概述
- ShaderLab
- ShaderLab:定义 Shader 对象
- ShaderLab:定义子着色器
- ShaderLab:定义一个通道
- ShaderLab:添加着色器程序
- ShaderLab:命令
- ShaderLab:使用 Category 代码块对命令进行分组
- ShaderLab 命令:AlphaToMask
- ShaderLab 命令:Blend
- ShaderLab 命令:BlendOp
- ShaderLab 命令:ColorMask
- ShaderLab 命令:Conservative
- ShaderLab 命令:Cull
- ShaderLab 命令:Offset
- ShaderLab 命令:模板
- ShaderLab 命令:UsePass
- ShaderLab 命令:GrabPass
- ShaderLab 命令:ZClip
- ShaderLab 命令:ZTest
- ShaderLab 命令:ZWrite
- ShaderLab 旧版功能
- Unity 中的 HLSL
- Unity 中的 GLSL
- Example shaders
- 编写表面着色器
- 为不同的图形 API 编写着色器
- 着色器性能和性能分析
- 材质
- 粒子系统
- 选择粒子系统解决方案
- 内置粒子系统
- 使用内置粒子系统
- 粒子系统顶点流和标准着色器支持
- 粒子系统 GPU 实例化
- 粒子系统 C# 作业系统集成
- 组件和模块
- 粒子系统 (Particle System)
- 粒子系统模块
- 粒子系统 (Particle System) 主模块
- Emission 模块
- Shape 模块
- Velocity over Lifetime 模块
- Noise 模块
- Limit Velocity Over Lifetime 模块
- Inherit Velocity 模块
- Lifetime by Emitter Speed
- Force Over Lifetime 模块
- Color Over Lifetime 模块
- Color By Speed 模块
- Size over Lifetime 模块
- Size by Speed 模块
- Rotation Over Lifetime 模块
- Rotation By Speed 模块
- External Forces 模块
- Collision 模块
- Triggers 模块
- Sub Emitters 模块
- Texture Sheet Animation 模块
- Lights 模块
- Trails 模块
- Custom Data 模块
- Renderer 模块
- 粒子系统力场 (Particle System Force Field)
- 内置粒子系统示例
- Visual Effect Graph
- 创建环境
- 天空
- 视觉效果组件
- 高级渲染功能
- 优化图形性能
- Color
- 物理系统
- 脚本
- 多玩家和联网
- 音频
- 视频概述
- 动画
- 创建用户界面 (UI)
- 导航和寻路
- Unity 服务
- Setting up your project for Unity services
- Unity Organizations
- Unity Ads
- Unity Analytics
- Unity Cloud Build
- Automated Build Generation
- 支持的平台
- 支持的 Unity 版本
- 共享链接
- 版本控制系统
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Git 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Mercurial 配置
- 将 Apache Subversion (SVN) 用于 Unity Cloud Build
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Perforce 配置
- 使用 Unity 开发者控制面板 (Developer Dashboard) 对 Unity Cloud Build 进行 Plastic 配置
- 发布到 iOS
- 高级选项
- 在 Unity Cloud Build 中使用可寻址资源
- 编译清单
- 计划构建
- Cloud Build REST API
- Unity Cloud Content Delivery
- Unity IAP
- Setting up Unity IAP
- 跨平台指南
- 应用商店指南
- 实现应用商店
- Unity Collaborate
- Setting up Unity Collaborate
- Adding team members to your Unity project
- 查看历史记录
- Enabling Cloud Build with Collaborate
- 管理 Unity Editor 版本
- Reverting files
- Resolving file conflicts
- 排除资源使其不发布到 Collaborate
- 将单个文件发布到 Collaborate
- 还原项目至以前的版本
- 进行中 (In-Progress) 编辑通知
- 管理云存储
- 将项目移动到另一个版本控制系统
- Unity Accelerator
- Collaborate troubleshooting tips
- Unity Cloud Diagnostics
- Unity Integrations
- Multiplayer 服务
- Unity 分发平台
- XR
- 开源代码仓库
- Unity Asset Store
- 平台开发
- 将“Unity 用作库”用于其他应用程序
- 启用深层链接
- 独立平台
- macOS
- Apple TV
- WebGL
- iOS
- Android
- Windows
- 将 Unity 集成到 Windows 和 UWP 应用程序中
- Windows 通用
- 通用 Windows 平台
- 已知问题
- 旧版主题
- 术语表
网格碰撞体
网格碰撞体 (Mesh Collider) 采用网格资源并基于该网格构建其碰撞体。在进行碰撞检测时,Mesh Collider 比使用复杂网格的基元更准确。标记为 Convex 的 Mesh Collider 可与其他 Mesh Collider 发生碰撞。
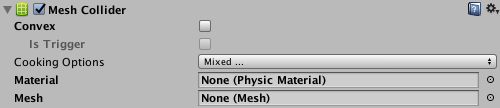
属性
| 属性 | 功能 | |
|---|---|---|
| Convex | 选中此复选框将使 Mesh Collider 与其他 Mesh Collider 发生碰撞。Convex Mesh Collider 最多 255 个三角形。 | |
| Is Trigger | 选中此复选框将使 Unity 使用该碰撞体来触发事件,而物理引擎会忽略该碰撞体。 | |
| Cooking Options | 启用或禁用影响物理引擎对网格处理方式的网格烹制选项。 | |
| None | 禁用下方列出的所有 Cooking Options。 | |
| Everything | 启用下方列出的所有 Cooking Options。 | |
| Cook for Faster Simulation | 使物理引擎烹制网格以加快模拟速度。启用此设置后,这会运行一些额外步骤,以保证生成的网格对于运行时性能是最佳的。这会影响物理查询和接触生成的性能。禁用此设置后,物理引擎会使用更快的烹制速度,并尽可能快速生成结果。因此,烹制的 Mesh Collider 可能不是最佳的。 | |
| Enable Mesh Cleaning | 使物理引擎清理网格。启用此设置后,烹制过程会尝试消除网格的退化三角形以及其他几何瑕疵。此过程生成的网格更适合于在碰撞检测中使用,往往可生成更准确的击中点。 | |
| Weld Colocated Vertices | 使物理引擎在网格中删除相等的顶点。启用此设置后,物理引擎将合并具有相同位置的顶点。这对于运行时发生的碰撞反馈十分重要。 | |
| Use Fast Midphase | 使物理引擎采用可用于您输出平台的最快速的中间阶段加速结构和算法。启用此选项后,物理引擎将使用更快的算法,这个算法不需要任何 R 树 (R-Trees) 即可进行空间访问。如果在某些平台上的运行时遇到中间阶段问题,您仍然可以禁用此选项,从而改用较慢的旧版中间阶段算法。 | |
| Material | 引用物理材质,可确定该碰撞体与其他对象的交互方式。 | |
| Mesh | 引用需要用于碰撞的网格。 | |
详细信息
Mesh Collider 从附加到游戏对象的网格构建其碰撞表示,并读取附加的变换组件的属性以正确设置其位置和缩放。这样做的好处是可以使碰撞体的形状与游戏对象可见网格的形状完全相同,从而产生更精确和真实的碰撞。但是,伴随这种精度的不足之处是,与涉及原始碰撞体(例如球体、盒体和胶囊体)的碰撞相比,处理开销会更高,因此最好谨慎使用 Mesh Collider。
碰撞网格中的面为单面。这意味着,游戏对象可从一个方向穿过这些面,但从另一个方向会与这些面碰撞。
如需了解网格碰撞体 (Mesh Collider) 使用的基础算法和数据结构的详细信息,请参阅 PhysX 文档。
网格烹制
网格烹制将常规网格更改为可以在物理引擎中使用的网格。烹制会构建用于物理查询的空间搜索结构(如 Physics.Raycast)以及用于接触生成的支持结构。Unity 在碰撞检测中使用网格之前烹制所有这些网格。这可在导入时 (Import Settings > Model > Generate Colliders) 或运行时进行。
如果要在运行时生成网格(例如,对于程序化表面),设置 Cooking Options 以更快地生成结果并禁用清理过程的其他数据清理步骤将非常有用。缺点是需要生成无退化三角形和非同位顶点,但烹制的运行速度更快。
如果禁用 Enable Mesh Cleaning 或 Weld Colocated Vertices__,则需要确保未使用那些算法在其他情况下可能会过滤的数据。如果禁用了 Weld Colocated Vertices__,请确保没有任何同位顶点,如果启用了 __Enable Mesh Cleaning__,确保没有面积接近零的小三角形,没有狭长的三角形,也没有面积接近于无限大的大三角形。
注意:将 Cooking Options 设置为除默认设置之外的任何其他值时,意味着 Mesh Collider 必须使用一个 isReadable 值为 true 的网格。
限制
使用 Mesh Collider 时有一些限制:
具有 Rigidbody 组件的游戏对象仅支持启用了 Convex 选项的网格碰撞体 (Mesh Collider):物理引擎只能模拟凸面网格碰撞体。
要使 Mesh Collider 正常工作,网格必须在以下情况下设置为 read/write enabled:
- Mesh Collider 的变换组件具有负缩放(例如 (–1, 1, 1))并且网格为凸面。
- Mesh Collider 的变换组件是倾斜或截断的(例如,当旋转的变换组件具有缩放的父变换组件时)。
- Mesh Collider 的 Cooking Options 标志设置为默认值以外的任何值。
不应修改用于碰撞体的网格几何体,因为每次更改网格时,物理引擎都必须重建内部网格碰撞加速结构。这会导致大量的性能开销。对于需要在运行时发生碰撞和进行更改的网格,通常最好使用诸如胶囊体、球体和盒体之类的原始碰撞体来模拟网格形状。
优化技巧:__如果 Mesh Collider 仅使用网格,则可以在 Import Settings__ 中禁用 __Normals__,因为物理系统不需要它们。
在 2018.3 版中更新了 Mesh Collider 限制
2018–10–12 页面已修订
在 2017.3 版中添加了网格的 Cooking Options NewIn20173
在 2018.1 版中更新了功能
在 2017.3 版中更新了与 read/write enabled 设置相关的限制
在 2018.3 版中已弃用 Inflate Convex Mesh,因为新的凸面外壳计算算法 (Quickhull) 更能容忍输入网格中的缺陷。
Copyright © 2021 Unity Technologies. Publication 2020.3